
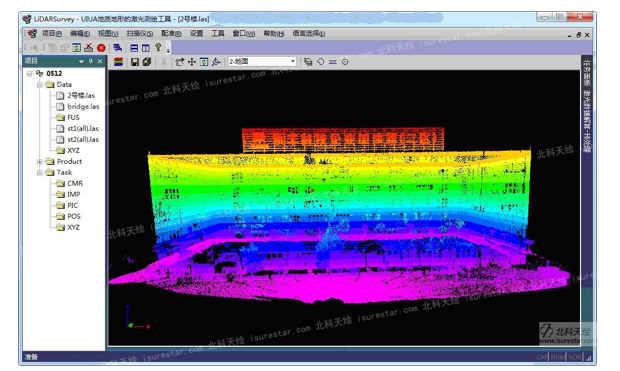
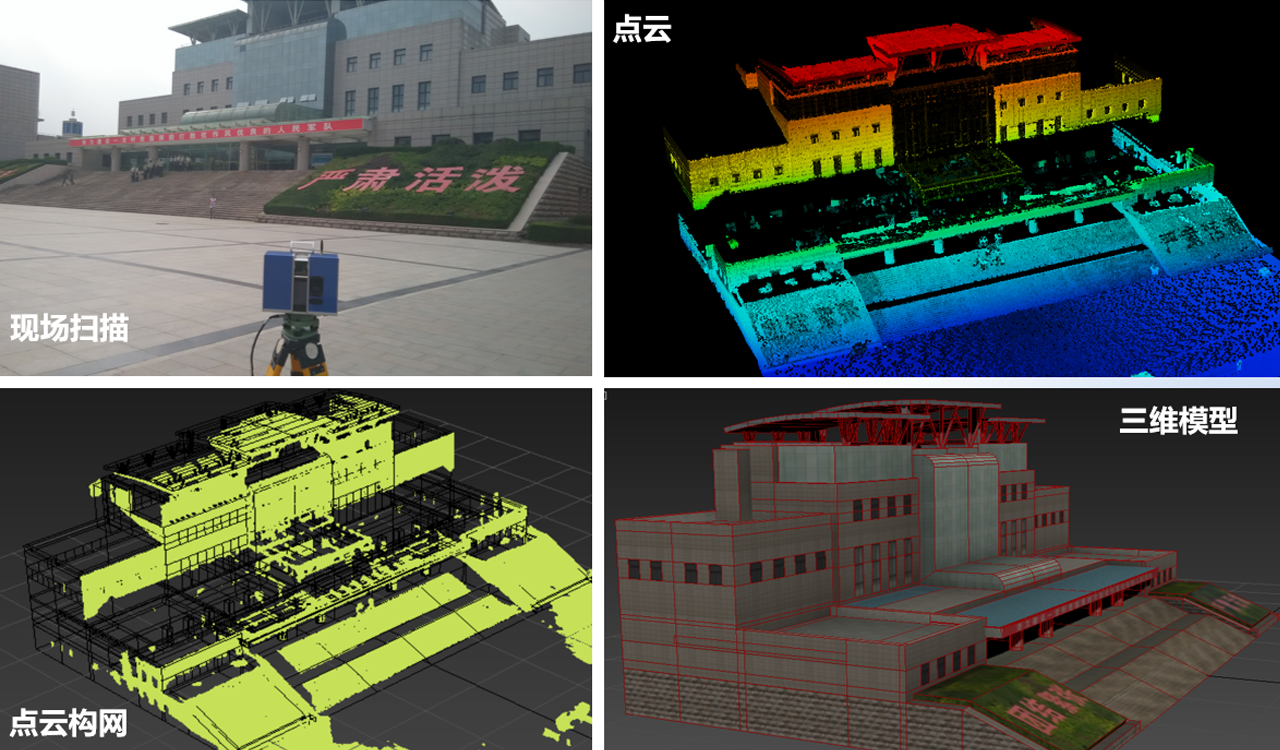
传统的三维建模方法主要由单点测量(全站仪、GPS等)或航空摄影测量的方法来实现的。但是这两种方式建立几何模型的工作量很大,精度也不高,不能快速获取三维空间数据、精确建立模型,而且后者也不适合小区域的数据采集。三维激光扫描技术通过非接触式测量快速获取物体表面大量的三维点云坐标和纹理颜色信息,是一种快速、精确、高效的三维空间信息获取方式。根据三维点云可以迅速还原三维场景、构建三维模型。
传统的三维建模方法主要由单点测量(全站仪、GPS等)或航空摄影测量的方法来实现的。但是这两种方式建立几何模型的工作量很大,精度也不高,不能快速获取三维空间数据、精确建立模型,而且后者也不适合小区域的数据采集。三维激光扫描技术通过非接触式测量快速获取物体表面大量的三维点云坐标和纹理颜色信息,是一种快速、精确、高效的三维空间信息获取方式。根据三维点云可以迅速还原三维场景、构建三维模型。
















 17318551998
17318551998 联系智能客服小北
联系智能客服小北









