

党的二十大报告强调,要加快实施创新驱动发展战略,着力推动高质量发展,吹响了新时代新征程以创新驱动引领高质量发展的前进号角。
近日,我国又一项在激光雷达领域的科技创新技术取得突破,引发关注。评价委员会专家认为,由深圳大学、武汉珞珈伊云等单位完成的“多频段新型测绘激光雷达技术及装备”整体技术达到国际先进水平,其中1500米空对地激光扫描的点云密度达到国际领先水平。
我国激光雷达在不断追赶中成长,有些已达到世界领先水平。测程远、精度高、频率快、穿透强、尺寸小、线数多、成本低、服务好的产品不断出现,激光雷达装备的自主化水平逐渐提高。
中国工程院院士刘先林告诉记者,虽然目前这一技术仍处于试验阶段,还没有达到大规模工程化应用水平。但是,他非常看好国产激光雷达的未来,他也一直致力于“测绘装备中国造”,持续支持鼓励国内激光雷达企业开展科技创新。刘先林院士多次表示,期盼着能早日用上拥有自主知识产权的国产高精度激光雷达装备。
你是我的眼,带我走过无尽的道路,激光雷达,带领自动驾驶走得更远,引领遥感行业走向未来。
近两年,随着激光雷达技术的进步与发展,其应用可谓百花齐放,打破了原来仅局限于军事领域的应用边界,在民用和商业领域都得到较快发展。在无人驾驶领域,关键技术之一就是激光雷达,其识别精度和速度均优于传统实现方式,传统机械旋转式激光雷达已经逐渐向固态或混合固态激光雷达方向转变,不断加快激光雷达量产上车的进程。

北科天绘是2005年成立的国内一家激光雷达企业,从成立之初至今的10多年来,刘先林院士通过技术支持、设备采购、联合参与国家863计划项目建设等多种方式鼓励北科天绘创新,开展国产激光雷达研发,其目的只有一个,尽快开发出国产激光雷达产品,引领产业发展,推动行业进步。
我国第一台车载激光雷达、第一套电力巡检系统、第一个导航激光雷达,全世界第一个激光雷达信号处理芯片、全世界最轻的无人机激光雷达……北科天绘也不负所望,实现了一次又一次突破,带着“推动激光雷达国产化”的情结,开发了许多叫得响的高品质产品,推动企业稳步发展。

从测量型、导航型激光雷达,到机载激光雷达,再到自动驾驶固态激光雷达,不断迎合市场需求,车载、机载、自动驾驶、无人机、手持终端等众多激光雷达产品已经得到广泛应用。刘先林院士也坦言,发展顺风顺水的北科天绘如今走到了十字路口,企业陷入困境,面临更大的抉择。
从这家企业的成长中,可以看到我国激光雷达技术的进步与行业发展的路径。近年来,激光雷达领域入局者越来越多,新兴的激光雷达企业如雨后春笋般一茬茬冒出来,特别是在自动驾驶发展地带动下,大量资金、人才加速进入该领域,赛道上日渐拥挤,各家都希望凭借更前沿的技术优势拿出高人一筹的创新产品,在未来竞争格局中分得一杯羹。
“固态激光雷达被自动驾驶吹捧得不得了,认为固态激光雷达是最可靠的。”刘先林院士为激光雷达的偏颇泼了冷水,并表示激光雷达市场需求正在发生改变,除了技术、管理、铺摊子等因素外,更重要的是自动驾驶放慢了脚步。
近日无人驾驶领域爆出一大新闻,自动驾驶明星初创公司Argo AI宣布倒闭了。市场分析人士说,这意味着尽管激光雷达在技术上取得了一系列进展,但距离人们预期目标还很遥远。刘先林院士表示,自动驾驶“最后一公里”难题还没有解决,比如物流配送车如何按电梯、如何上楼等问题。需求导向,“停”下来意味着应用需求不振,这也是北科天绘等激光雷达企业面临困境的原因之一。
那么,在自动驾驶领域,激光雷达的未来和希望在哪儿?要在哪些方面发力呢?刘先林院士认为,还是要在技术上、在融合机制上寻求突破,以解决自动驾驶“最后一公里”之困。采取单独的全影像、全固态体制都不是最好的解决办法。

刘先林院士与团队骨干进行技术讨论
“我仍然看好激光雷达的未来。”对此,刘先林院士为自动驾驶支招,认为自动驾驶有两个根本的解决方案:一个是单车方案,一个是车联网方案,他更看好车联网方案,在技术实现上一定要有高冗余度。
“你的车怕撞到我,那么我的车也能感知到你正在靠近我,主动避障躲着你,这样不是就可靠一些嘛。”刘先林院士主张,一是要车路协同,利用大数据云平台来管理;二是作为单车来讲,相控阵雷达、毫米波雷达、超声波雷达这些传感器都要有,但这不是自动驾驶的主要传感器,而要靠激光雷达和影像进行避障。
“总体而言,目前我国激光雷达技术水平和国外差不多是持平的,从跟跑到了并肩跑,很不容易。”刘先林院士非常认可国产激光雷达取得的进步。虽然国产激光雷达行业起步比国外晚,但国内的雷达厂商经过几年的技术研究,推出的系列激光雷达不但性能可以和进口雷达相媲美,在价格方面也比国外高价雷达更具优势。
“我们一直坚持使用国产装备,也订购了很多国产激光雷达设备支持国产化。但是,由于国产激光雷达稳定性没有那么好,研发团队在完成某些要求精度高的任务时,不得不采购进口设备和国外一些如激光管这样的核心元器件,这是客观事实。”刘先林院士有些无奈地说,其实国产激光雷达和国外产品相比,只差了那么一点,比如在道路、路面标线信息提取的时候,国产激光雷达数据需要用强度影像做一个修正,才能符合指标要求。
“传统的测绘手段耗时耗力,数据获取过程多为单点式采集,还要到实地测量,其成果不能满足信息化时代生产实践的需求。”自2009年作为一名在读硕士生来到北京四维远见信息技术有限公司实习至今,马浩博士一直追随刘先林院士进行国产移动激光测量系统的研发,他也见证了这10余年来国产激光雷达从无到有快速发展。
马浩认为,激光雷达技术在测绘领域的应用,使传统的时空数据获取手段发生了质变,激光雷达主动连续的获取方式极大地提高了外业作业效率。通过发射激光和接收回波的距离测量方式,结合定位定姿系统,不仅可以获取被测物的绝对点位坐标信息,同时还能记录反射强度、纹理信息等,这些丰富的信息为后续数据广泛应用带来了可能。
相比国外动辙上百上千万元的高价产品,国产激光雷达性价比更优,且能提供一体化解决方案。比如,深圳一家公司采用刘先林院士团队研发的具有世界领先水平的SSW移动激光测量解决方案,近三年完成了全深圳6000余千米道路及交通设施管理一张图项目建设,该技术实现了道路基础设施构件化自动建模,可节省人工作业量40%以上,极大提高了生产效率。
国产激光雷达技术的进步,促进了测绘行业技术发展。从传统自动化水平低的劳动密集型作业方式转变成为以人工智能技术为主、半自动交互作业为辅的作业模式,激光雷达为大面积生产三维道路模型和交通设施数字化管理提供了有力的技术支撑。同时,数据成果形式实现了从二维向三维的升级。
一沙一世界,一点一方位空间。激光雷达发射激光光束,通过测量光线打到物体上再反射回来计算所需要的时间,就可以算出激光器与被测物体间的距离,形成数据点,这个过程可能会获得数百万个数据点,业界称之为点云数据。

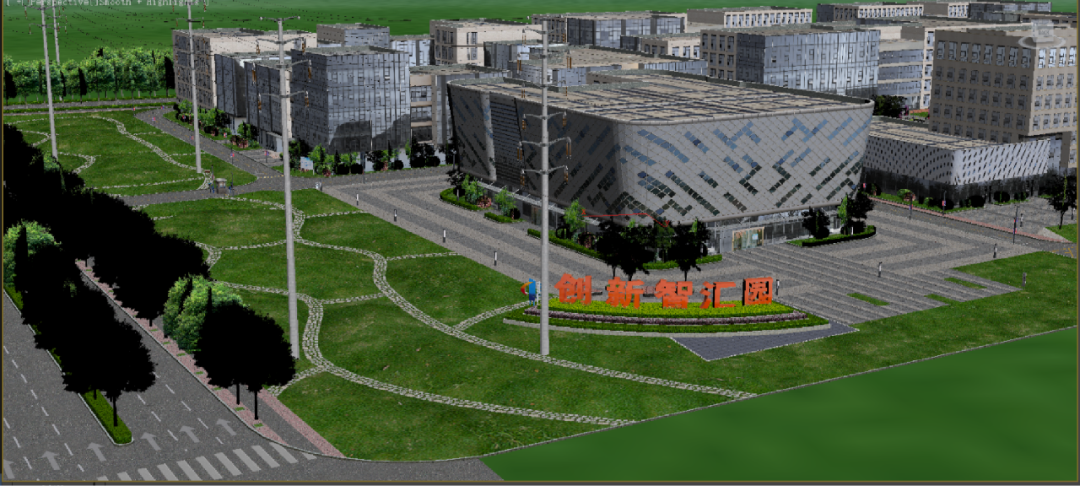
道路部件级三维模型
“为什么叫点云数据呢?你看,这些都是激光雷达点云数据,看上去就是一堆点的集合,像云彩一样,有上亿个点。”马浩指着屏幕上略带些颜色的小点说,你能看出上面除了点之外还有什么吗?我想一定不能。再看这一张,观者一眼就能分辨出地面、树木、指路牌等信息,甚至地面道路上导向标志线都一清二楚。其实,这就是前面那张点云图经过数据处理后的结果。
鼠标移动到小点上,就会显示XYZ三维坐标信息,图上还有颜色信息、反射强度信息、回波次数信息等。通过技术转换,点云数据相对坐标就能转换为大地坐标,这样的数据成果被大量应用,比如通过这些点,能计算两者间的长度、面积、体积、角度等信息,由此构成测绘要素。
激光雷达搭载不同的载体上,比如星载、机载、车载、地面(包括背包、手持、便携式),获取的不同点云信息各有不同的应用场景。比如做全球性宏观研究,全球30米网格DEM(数字高程模型),就用到星载激光雷达获取数据;做某一区域的地形,监测山区滑波、泥石流等隐患,服务应急测绘,服务城市级、国家级规划、道路选线、输变电站址等都要考虑地形,考虑走向,就需要用机载激光雷达扫描三维数据。再如采集古建筑信息等这些小范围、要求更精细的空间数据时,就可以采用架站式或手持激光雷达。
机载激光雷达呈现的是离散的点云,点与点间距比较大,一个平方米几十个点,点与点间距为分米级;车载激光雷达沿道路采集数据,生成的点云,点与点间距为厘米级;地面便携式激光雷达,点与点间距可以小到几毫米,精度更高,达到毫米级。
“以前没有激光雷达的时候要做这些事,就需要上人了,人去实地勘测。传统测绘技术手段比如全站仪、RTK等,其数据单一且采集效率低。慢慢发展起来的摄影测量技术,产品形式更丰富,作业效率有了大幅提高。”马浩介绍说,基于卫片、航片的摄影测量技术是一种间接的坐标获取方式,通过多视角匹配,获取目标物的空间信息。就是要把物体的各个角度都拍下来进行匹配接拼才能形成立体形态,才能算出来其中一个像素的三维坐标。激光雷达则不同,可以直接获取到物体的三维坐标,是一种原理与摄影测量不同的空间数据获取方式。国家正在推进的新型基础测绘、实景三维中国建设,激光点云作为一种重用的数据源,有了更广阔的用武之地。
马浩一边介绍一边在电脑上展示三维点云成果图给记者看。说实话,外行人看这样的点云图像,真有一种像看毕加索画展一样,时而简洁(无颜色),时而浓烈(有颜色),时而让你不知所云(离散点)。就是这么神奇的一堆小点,附带着众多信息,把现实世界精准地刻画出来。殊不知,这些信息的背后有着更大的想象空间,比如生成的矢量数据成果,可以做城市规划,可以为自动驾驶提供高精地图等不一而足。也不难知道,为什么近年激光雷达如此受热捧,大量资金涌入,应用领域之广了。激光雷达数据的魅力,借用业界一句话来说:“只有想不到,没有做不到。”
“‘需要是发明之母’,要先找准市场需求,再做研发,做到市场只能用你这种发明。”这是刘先林院士挂在嘴边的话。结合需求搞装备研发成为他的基本原则,从而他的所有创新成果没有一个躺在文件柜,全部在实际中得到了应用,转化为了现实生产力。
早在2003年,刘先林院士就提出将激光雷达技术应用于车载激光移动测量,并展开相关科学研究和产品开发。经过多年积淀,已形成SSW车载激光建模测量系统、SSW车载全景测量系统、轻型室内外测量系统等系列产品,处于国际领先地位。“我们的产品出来后,移动扫描应用面越来越广,国内同行也越来越多地能做这种系统,可以说带动了行业发展。”研发团队的科研人员表示。

刘先林院士团队开发的国产车载激光测量系统
“刘先林院士带领团队研发的自动化处理软件‘大一键’,也是一项国际领先的创新产品,或者说国外还没有这种全自动数据处理产品,我们一直引以为傲。”马浩说,这一技术突破,实现了底层完全自主开发,可全自动提取全要素特征数据,综合成功率在80%以上,作业效率提高40%。
“我们‘大一键’很有特色,街上跑一趟,基本上采集的四五十类或七八十类城市部件,80%—90%都可以自动提取出来。而且,生产出来的结构化数据不是光眼睛看,计算机也可以读懂,可以识别了。”刘先林院士自豪地告诉记者,过去巡航导航需要DSM(数字表面模型)数据,现在是巡飞导航,用结构化数据支撑,计算机能看懂,总之,不是看着打,而是算着打,区别就在于此。“大一键”之意是,数据拿来后,按一个按钮,就开始自动化处理。
“你看我就一直在等这个东西,我都80多岁了,开不了车了,有自动驾驶就方便多了。”刘先林院士期盼着国内激光雷达技术能够取得更大突破,也期盼着无人驾驶时代能早点到来。
在他看来,目前激光雷达还有许多需要创新突破的地方:
一是放大器线性问题,现在的激光雷达采用的是两个放大器,且它们之间不是线性连接。所以,要改成一个放大器,其强度回波要一级放大器,或者是两个放大器的线性度要非常好才行,这样强度影像才能来代替影像,供深度学习用,否则强度影像就没有依据了。
二是自动驾驶激光雷达,需要真正的没有机械运动的固态激光,且纯固态激光雷达会有一定市场。
三是“我期待星载扫描激光,现在星载上只是测高仪,或者是单光子激光雷达,没有扫描激光。如果可以研发出星载扫描激光,对航空市场会带来很大冲击。”刘先林院士说。
身背“双肩背包”,上面有向上伸出的长长拉杆,顶端有一个圆盘状的卫星接收器,头顶上方是一台360度全景相机,身上还有多种激光雷达传感器,在院子里边走边测,这样的镜头可以经常在中国测绘大厦院里见到。不用问,这一定是刘先林团队的科研人员又在测试激光雷达设备……
来源:中国测绘学会











 17318551998
17318551998 联系智能客服小北
联系智能客服小北









